Sandro Papais

I’m Sandro Papais, a Ph.D. Candidate at the University of Toronto Robotics and AI Lab with Prof. Steven Waslander, an Affiliate Researcher at the Vector Institute, and a Machine Learning Perception Researcher at Zoox. I build spatiotemporal transformer models that let robots perceive and act in real time.
My current research develops end-to-end spatiotemporal models for perception, prediction, and planning that reason over time, preserve object permanence, and focus on decision-critical content — including a recent patent filing on sparse 3D object detection. I also co-authored a book on motion prediction for robotics in Foundations and Trends in Robotics.
Previously, I developed autonomy software for interplanetary spacecraft at NASA JPL, lunar landers and eVTOLs at NGC Aerospace (some of which has now flown to the Moon), and rovers at the European Space Agency. I also developed course materials for the Self-Driving Cars Specialization on Coursera, used by 120k+ learners.
Recognition includes the Qualcomm Innovation Fellowship for autonomous driving foundation models research (one of 266 proposals) and the Ontario Graduate Scholarship. I’ve taken first place at the AutoDrive Challenge II and the Spaceport America Genesis Cup, and my research on autonomy was featured by U of T News.
Graduating August 2026 and exploring new opportunities — get in touch.
Selected Publications
-
-
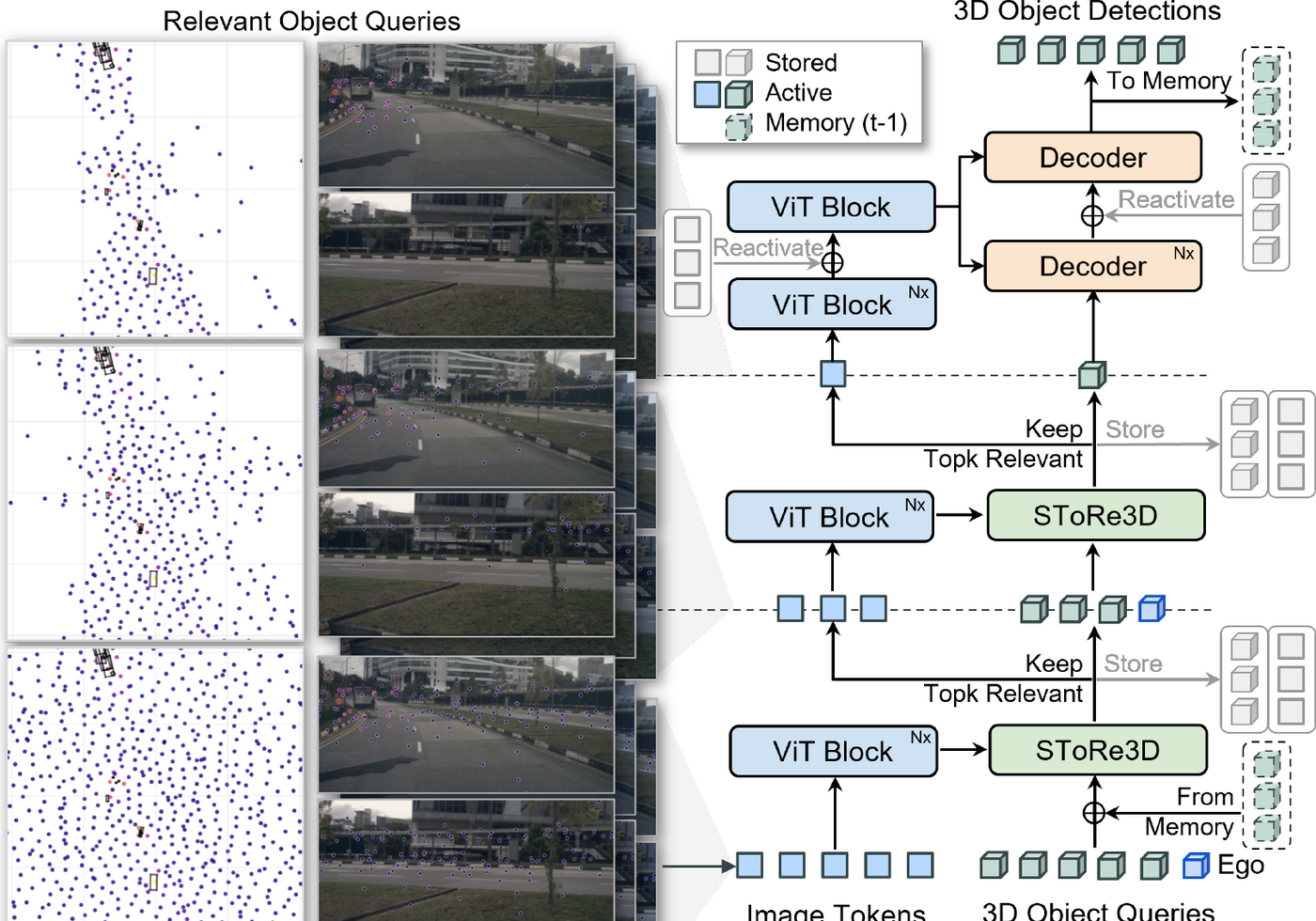 SToRe3D: Sparse Token Relevance in ViTs for Efficient Multi-View 3D Object DetectionIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026
SToRe3D: Sparse Token Relevance in ViTs for Efficient Multi-View 3D Object DetectionIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026 -
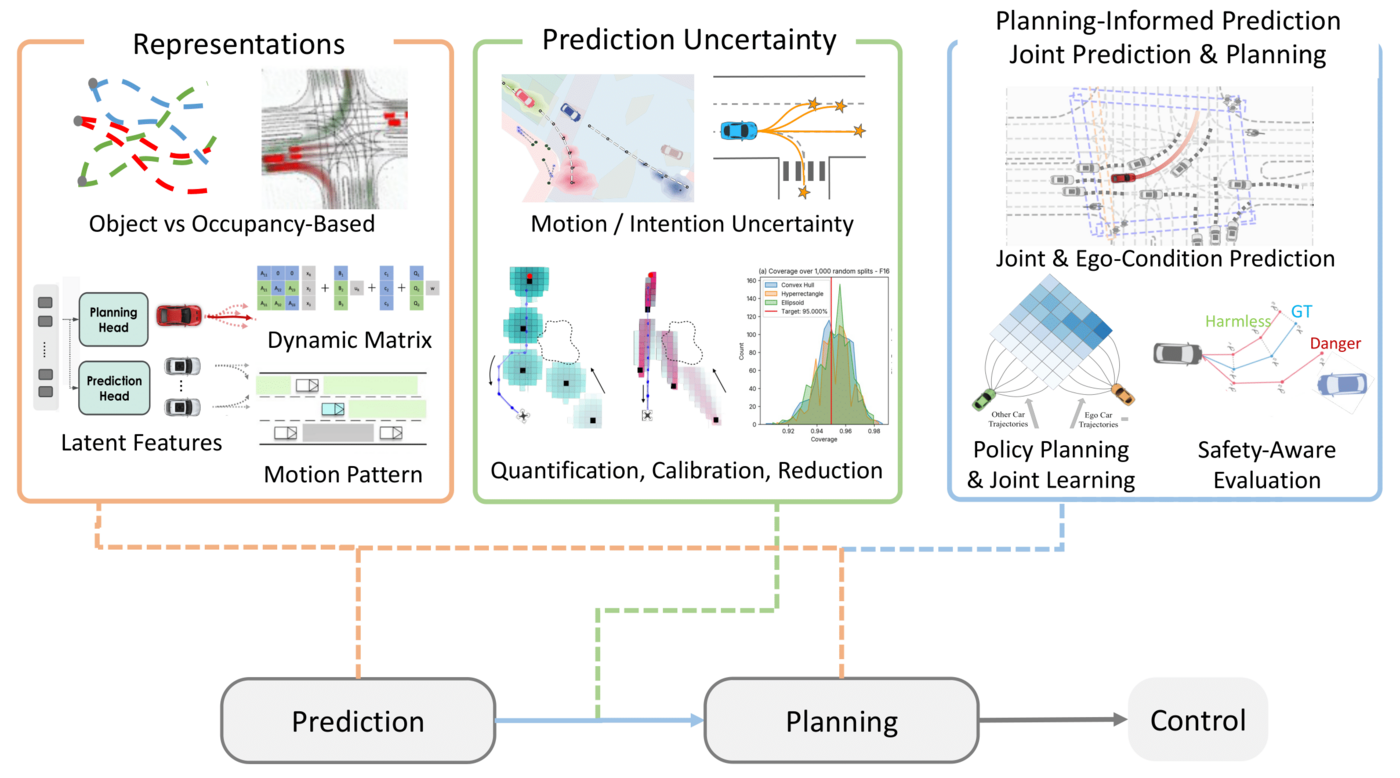 Trends in Motion Prediction Toward Deployable and Generalizable AutonomyFoundations and Trends in Robotics, 2026
Trends in Motion Prediction Toward Deployable and Generalizable AutonomyFoundations and Trends in Robotics, 2026 -
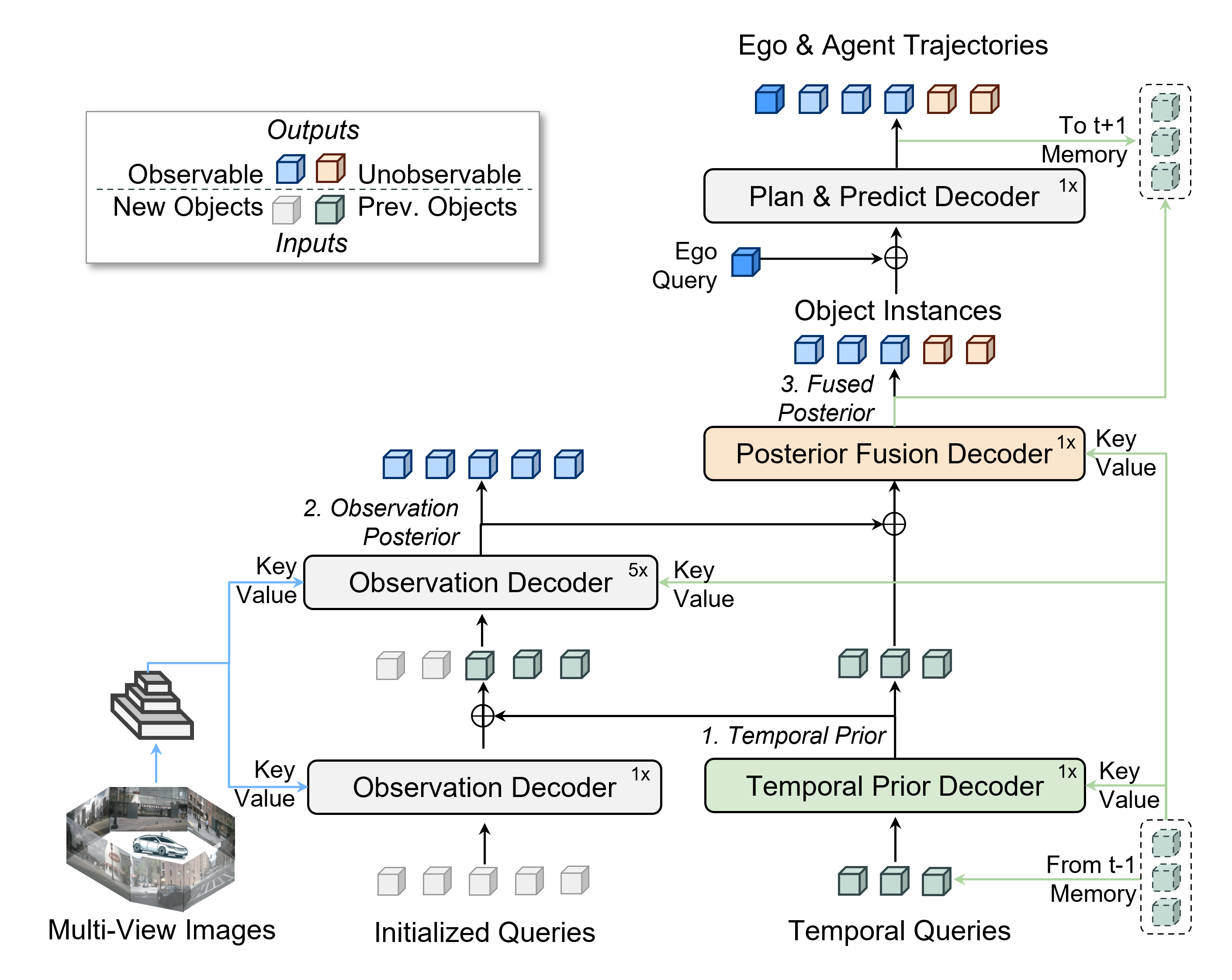
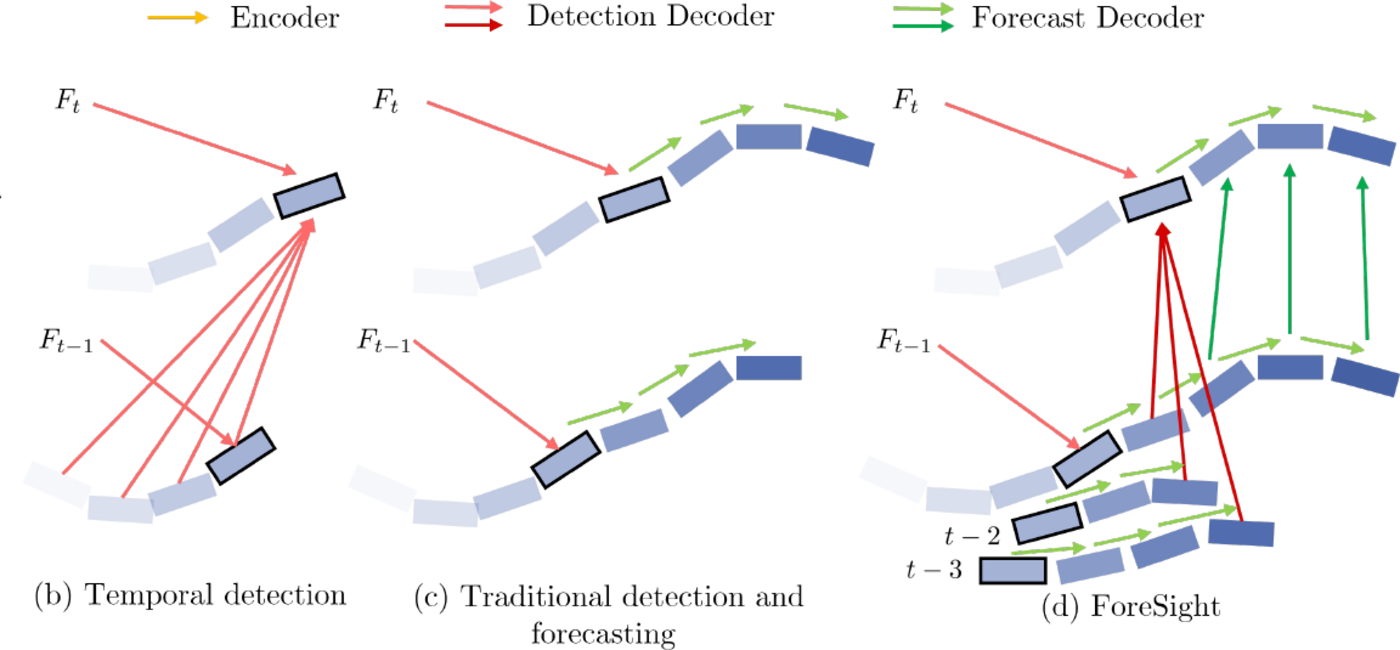 ForeSight: Multi-View Streaming Joint Object Detection and Trajectory ForecastingIn Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Oct 2025
ForeSight: Multi-View Streaming Joint Object Detection and Trajectory ForecastingIn Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Oct 2025 -
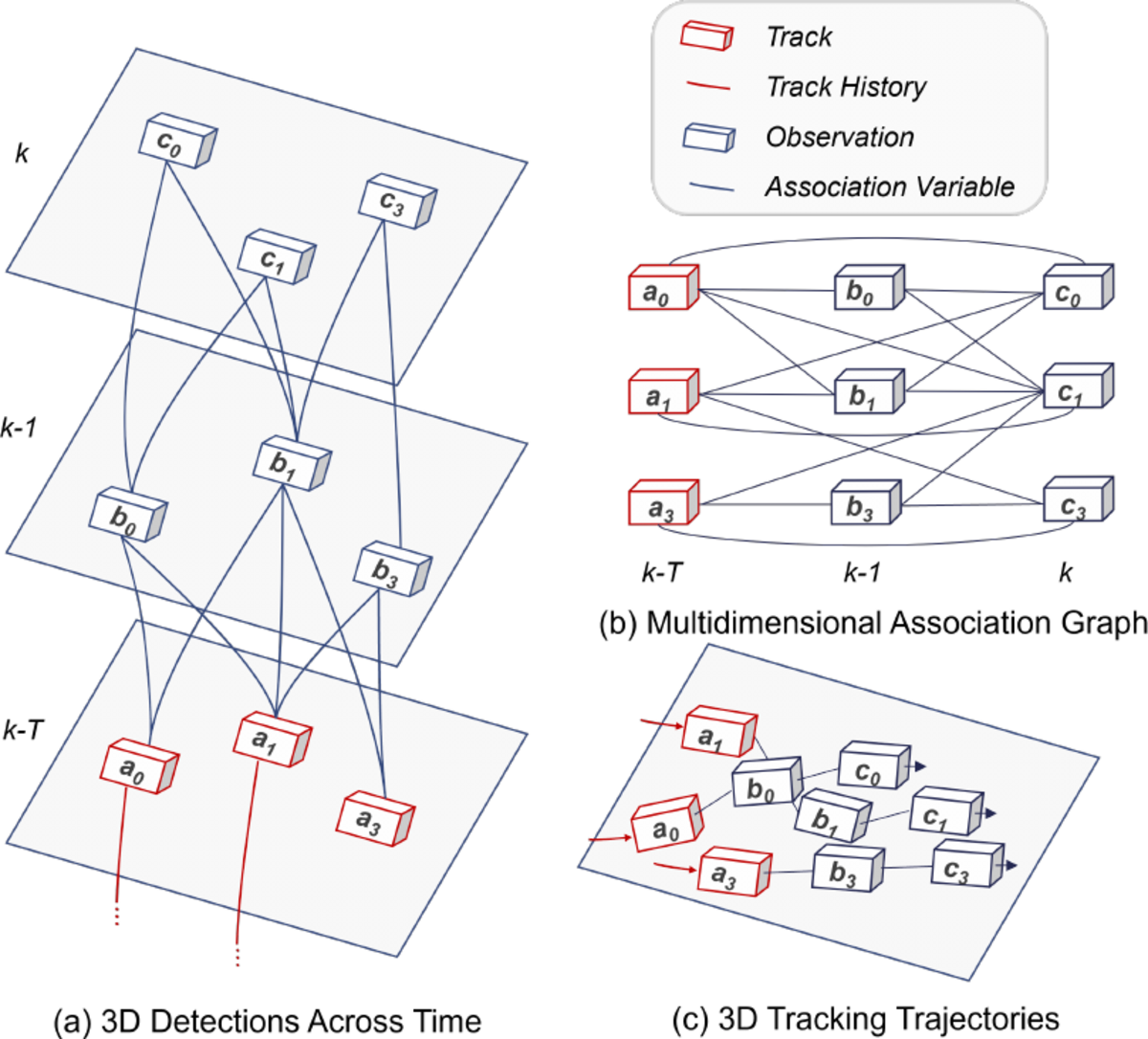 SWTrack: Multiple Hypothesis Sliding Window 3D Multi-Object TrackingIn 2024 IEEE International Conference on Robotics and Automation (ICRA), Oct 2024
SWTrack: Multiple Hypothesis Sliding Window 3D Multi-Object TrackingIn 2024 IEEE International Conference on Robotics and Automation (ICRA), Oct 2024





Selected Work